


机器焊接的不同寻位方式对比
发布时间:2023-12-06
焊接机器人作为现代制造业中的重要装备,广泛应用于各行各业。在焊接过程中,准确的焊缝寻位是保证焊接质量和效率的关键因素之一,也是实现焊接自动化生产的难点之一,解决自动化焊缝寻位难题是该领域的主要关注方向。
焊缝寻位,也称为焊缝传感,是在焊接过程开始之前检测工件上目标焊缝的位置和方向的过程,通常是使用传感器和软件程序来引导焊枪到缝的精确位置。焊缝寻位的目的是确保焊接精确地应用到焊缝上,这对于确保焊接的强度和完整性非常重要。然而,在一些大型工件焊接时,由于下料和组队误差的存在,焊枪初始位置定位完全依靠人工示教的方式进行,不仅效率低、精度差,而且对于水下焊接、狭小空间中焊接等操作人员不易到达的场合,人工定位识别焊缝轨迹走向尤为困难。
为了解决机器人示教编程复杂的问题,实现机器人自动化焊接,工程师们开发出了以下寻位方式:
一、焊丝寻位

(图片来源于网络)
焊丝寻位是一种简单而直观的定位方式。它通过焊丝与工件表面的接触,检测焊丝电信号来确定焊接位置。当焊丝触碰到工件表面时,会产生电压信号,接触传感器将电压信号反馈给机器人,机器人则会利用当前位置与程序设定位置的偏差值对路径进行修正,从而得出真实目标位置。

图1接触寻位原理
优势:
•操作简单,适用于焊接工艺相对简单、焊接目标形状规则的工件。
•由机器人集成,不受工件表面影响,不增加额外体积,而且成本相对较低。
劣势:
•焊丝与工件表面接触过程中易受到工件表面杂质的干扰,对工件表面的平整度和粗糙度有一定要求。
•不适用于高精度和表面敏感的焊接任务。
•逐点触碰,效率低。
二、激光寻位
(图片来源于网络)
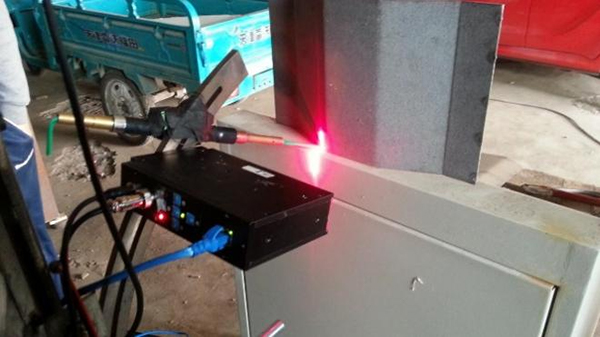
激光寻位即利用激光传感器对想要测量的位置进行单次测量,并计算目标点位置的过程。其工作原理是依靠激光视觉,由激光照射到焊缝表面,形成激光点或激光线,提取焊缝的特征数据点,并进行记录。在焊缝发生偏移后,再次采集焊缝的特征数据点,并自动计算出两次记录的点之间的差值,然后将偏差值添加到焊枪点来保证焊枪准确地达到焊缝起始位置,从而修正偏差。
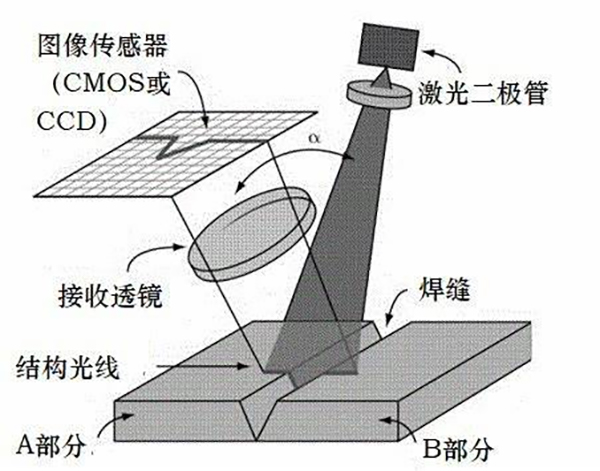
图2激光寻位原理
激光寻位又包括点激光寻位和线激光寻位两种方式:
点激光寻位
点激光寻位,是在焊接工件偏离示教点时,通过点激光传感器检测出示教点(开始点、中间点、结束点等)处的偏离量,并对各焊接线进行3D平移补正。激光点由激光器产生,经过适当的光学系统聚焦成小点。焊接机器人通过激光点在工件表面的坐标位置来确定焊接位置。
线激光寻位
线激光寻位是利用激光线在工件表面的位置来确定焊接位置。激光线由激光器产生,经过适当的光学系统聚焦成线形。在焊接过程中,线激光双目视觉传感器检测焊缝轨迹的空间位置和初始姿态,通过激光线在工件表面的位置和方向来确定焊接位置。线激光寻位方式相对于点激光寻位方式具有更高的精度和定位能力。
无论是点激光还是线激光,在焊接应用上也都有一定的优劣势。
优势:
•无接触:激光束无需直接接触工件表面就能完成焊接过程,可避免由于接触引起的污染和损伤,并减少工件的变形风险。
•激光寻位方式具有较高的精度和灵活性,可以适应不同形状和尺寸的焊接工件。
劣势:
•效率低:激光寻位对于光照条件和工件表面质量有一定要求,容易受到工件表面杂质的干扰,效率低下。
•编程复杂:激光焊接对操作技术和经验要求较高,编程复杂耗时。
•增加了额外的体积,对狭小空间不适用
总之,无论是焊丝寻位还是激光寻位这两种方法都需要提前进行示教编程,然后利用先验知识计算偏移量,准备工作耗时长,无法对应复杂场景。随着3D视觉技术的快速崛起,更加简便的3D相机寻位为机器人自动化焊接提供了新的可能。
3D相机寻位
(图片来源于网络)
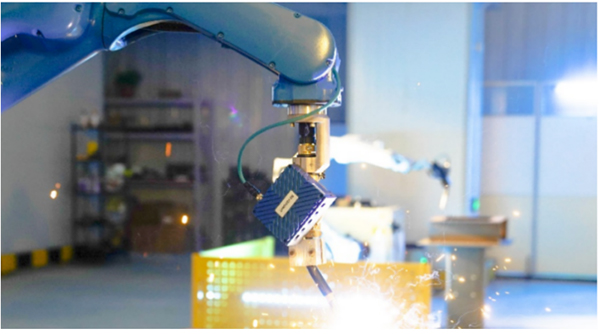
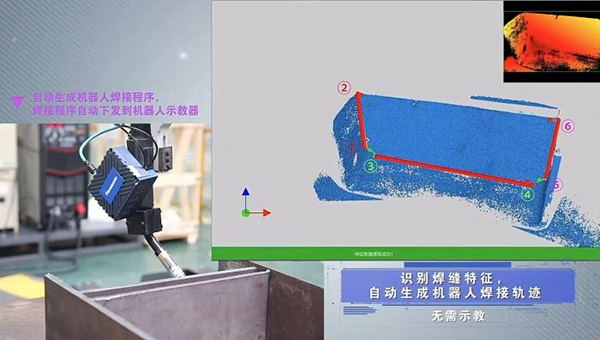
3D相机寻位是利用三维相机系统获取焊接工件的三维形状和纹理信息,通过图像处理和模式识别算法来确定焊接位置。3D相机寻位时,相机先拍摄工件的三维点云数据,直接识别出焊缝的位置,并直接计算焊接姿态,寻位速度快效率高。与传统的焊丝寻位和激光寻位相比,3D相机寻位更加灵活高效:在焊前准备阶段无需对焊缝进行示教编程,在焊接过程中单次拍照识别多条焊缝,大大简化了操作,帮助用户提高生产柔性和效率。
(图片来源于网络)
优势:
•无接触:3D相机无需直接接触工件表面,可避免由于接触引起的污染和损伤。
•效率高:无需提前示教编程,直接计算焊接姿态,一次拍照识别多条焊缝。
•容差高:可适应较大的平移旋转误差,只要能拍到就能识别到。
劣势:
•成本相对焊丝寻位和激光寻位更高。
•增加了额外的体积,对狭小空间不适用。
从焊丝寻位到激光寻位,再到3D相机寻位,机器人获取到的信息的维度一直在提升,智能化程度也在不断提高,对应的技术难度也不断加大。
知象光电立足于3D视觉硬科技,建立了从光学芯片、成像算法、到应用软件的自主技术体系,并较早地将3D视觉应用到机器人自动化焊接领域。其推出的Tracer P2凭借其强大的计算芯片、工业级精度、高防护的性能,搭载机器人视觉软件Tracer Studio,可实现3D点云实时采集、复杂焊缝特征快速提取、机器人轨迹智能规划、工件找正定位等功能,可广泛应用于钢结构、车厢板、人防门、钢筋、管板焊接等各种复杂严苛的工作环境。

(图片来源于网络)
上一篇:3D视觉在机器人焊接领域的应用、挑战与机会
下一篇:知象光电 Revopoint 亮相 Vision China 2025,展现高精度视觉技术硬实力!
热门资讯
-
1. 3D工业相机那个品牌好? 1528

2. 焊接视觉技术国内外研究现状 1057
3. 知象光电3D焊接视觉系统助力智能制造落地提速 853
4. 机器之眼 | 3D相机能让机器人看见什么? 712
5. 3D相机 | 工业机器人无序抓取,用3D相机就对了! 644
6. 3D相机检测,到底有多优秀? 607
7. 新发展 3D机器视觉VS工业自动化 591
8. 机器焊接的不同寻位方式对比 498
9. 3D相机应用盘点之焊接自动化 454
.
-
10. 3D相机成机器视觉标配-焊接自动化大势所趋 438
11. 智能人脸补全算法 389
12. 3D相机应用前景分析 工业4.0时代的标配 381
13. 3D相机是什么?3D相机效果怎么样? 373
14. 视觉传感器技术分类 372
15. 工博会金秋开启,要逛展先看这里! 269
16. 中国工博会9月盛大启幕,知象光电期待与您沪上相约! 267
17. 智能控制与自动化不可或缺的机器视觉装备 254
18. 经典案例丨数模驱动,焊接自动化智慧升级 218
.
-
19. 3D视觉在机器人焊接领域的应用、挑战与机会 207
20. 9月光博会,你不可错过的除了知象光电,还有这些逛展福利!(超详细攻略,按需自取) 180
21. 知象光电 Revopoint 亮相 Vision China 2025,展现高精度视觉技术硬实力! 13
 换一换
换一换
最新资讯
-
1. 知象光电 Revopoint 亮相 Vision China 2025,展现高精度视觉技术硬实力! 13
2. 机器焊接的不同寻位方式对比 498
3. 3D视觉在机器人焊接领域的应用、挑战与机会 207
4. 经典案例丨数模驱动,焊接自动化智慧升级 218
5. 知象光电3D焊接视觉系统助力智能制造落地提速 853
6. 视觉传感器技术分类 372
7. 焊接视觉技术国内外研究现状 1057
8. 工博会金秋开启,要逛展先看这里! 269
9. 3D相机应用盘点之焊接自动化 454
.
-
10. 3D相机应用前景分析 工业4.0时代的标配 381
11. 9月光博会,你不可错过的除了知象光电,还有这些逛展福利!(超详细攻略,按需自取) 180
12. 中国工博会9月盛大启幕,知象光电期待与您沪上相约! 267
13. 3D相机检测,到底有多优秀? 607
14. 3D相机 | 工业机器人无序抓取,用3D相机就对了! 644
15. 机器之眼 | 3D相机能让机器人看见什么? 712
16. 3D工业相机那个品牌好? 1528
17. 3D相机是什么?3D相机效果怎么样? 373
18. 3D相机成机器视觉标配-焊接自动化大势所趋 438
.
-
19. 智能人脸补全算法 389
20. 智能控制与自动化不可或缺的机器视觉装备 254
21. 新发展 3D机器视觉VS工业自动化 591
换一换
 在线咨询
在线咨询
