


Tracer 3D 机器人焊接视觉系统
Tracer 3D 机器人焊接视觉系统由焊接面扫描 3D 相机 Tracer P 系列、焊接视觉软件 Tracer Studio、机器人视觉仿真软件 Tracer Studio Plus 等构成, 可搭配各品牌主流焊接机器人,通过 3D 相机拍照,配合智能算法,实现复杂焊缝特征识别、焊接路径规划、在线仿真及数字孪生等功能。 适用于钢结构、车厢板、钢筋、人防门等装配误差大的焊接生产场景,帮助用户实现自动化生产,显著提高生产效率,降低人工成本。

功能强大

便捷易用

容差能力强

高效精准

开放生态

数模驱动
可适应工件类型
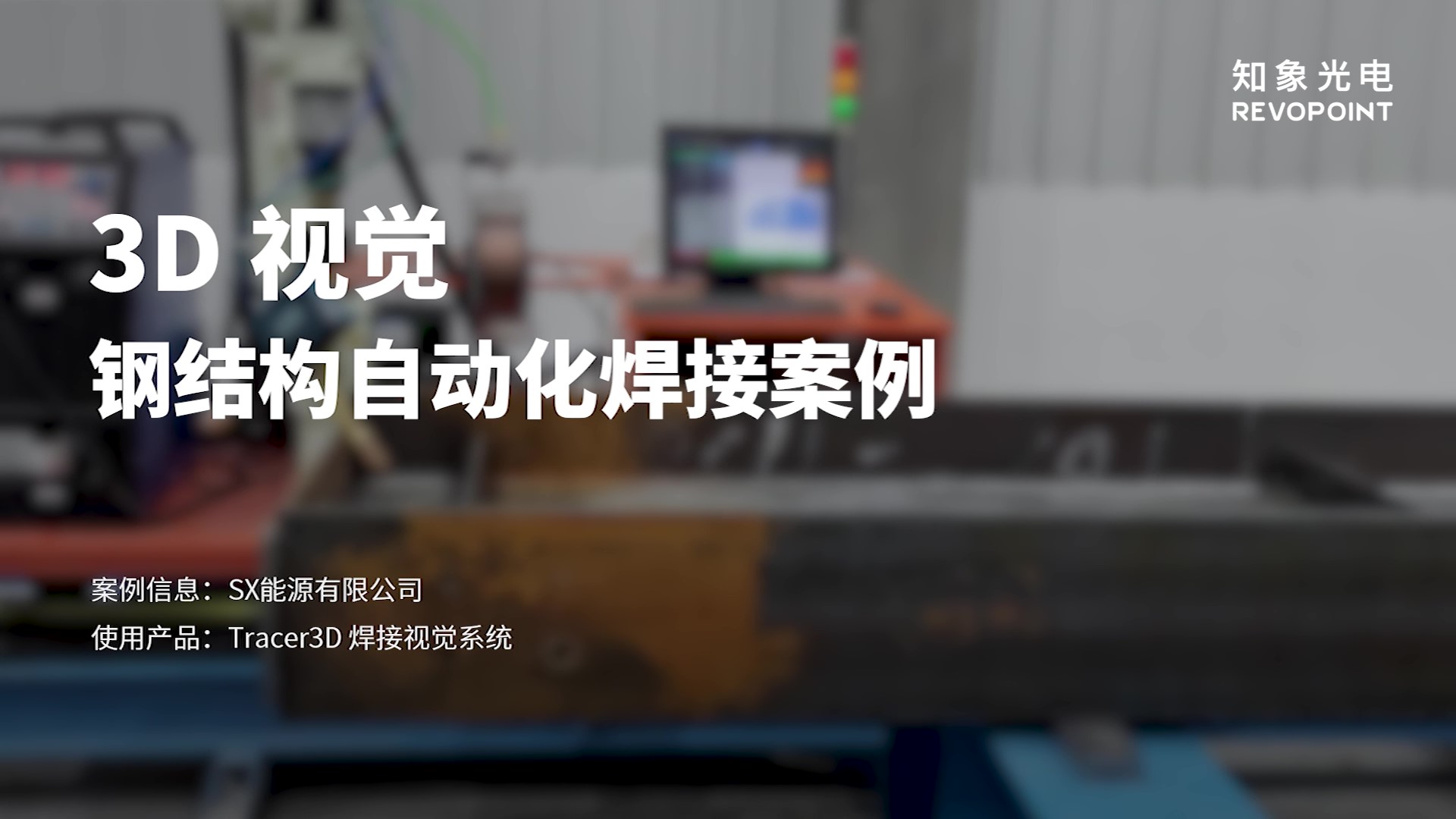
钢构
工字钢组合
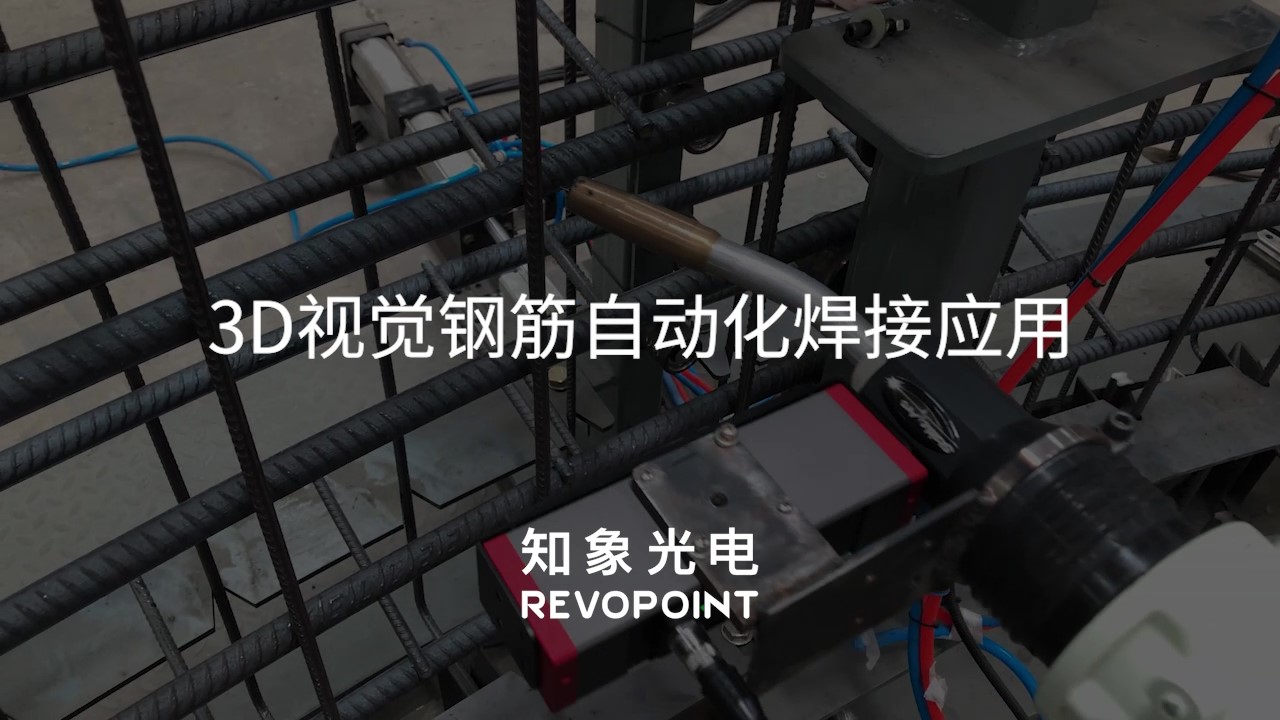
钢筋组合
管板组合
平面角接
圆弧角接
可适配机器人品牌
















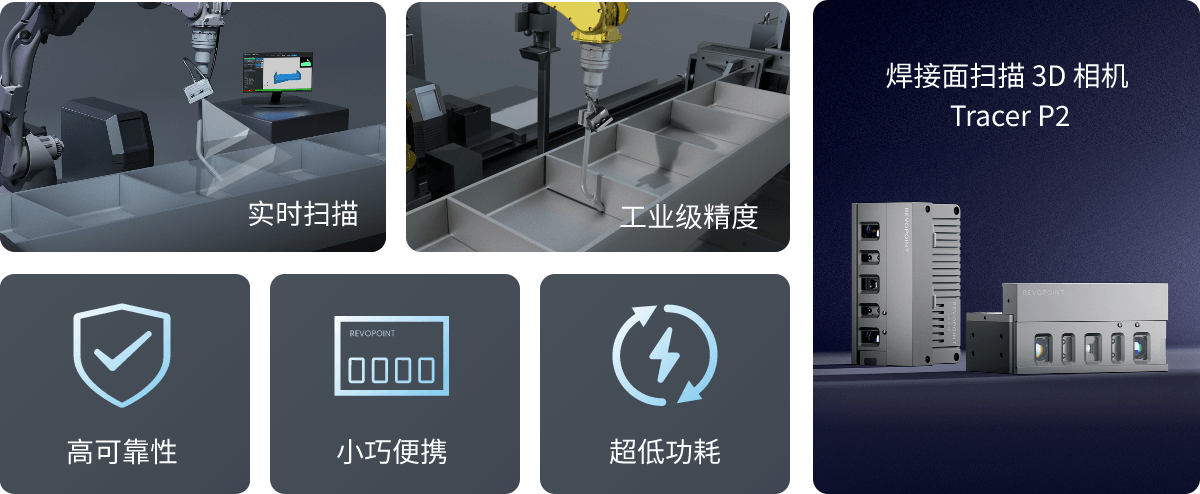
焊接面扫描 3D 相机 Tracer P2
Tracer P2 采用全自主研发的微结构光技术,是一款专为工作环境恶劣的机器人焊接场景设计的3D相机。内置强大算法芯片,实时输出 2-6 帧的点云数据; 防护等级高,抗飞溅,耐高温,适应复杂严苛的焊接工作环境;体积小,重量轻,易于机器人未端集成; POE供电,超低功耗,方便布线,与机器人或焊接专机搭配使用,助力用户实现自动化焊接生产,提高生产效率。

适应复杂严苛的工作环境

抗飞溅
防水( IP65)

耐高温(70°C)

抗静电(接触±4.0kV)
抗振动(频率 5-500Hz)
抗电磁辐射(CE)
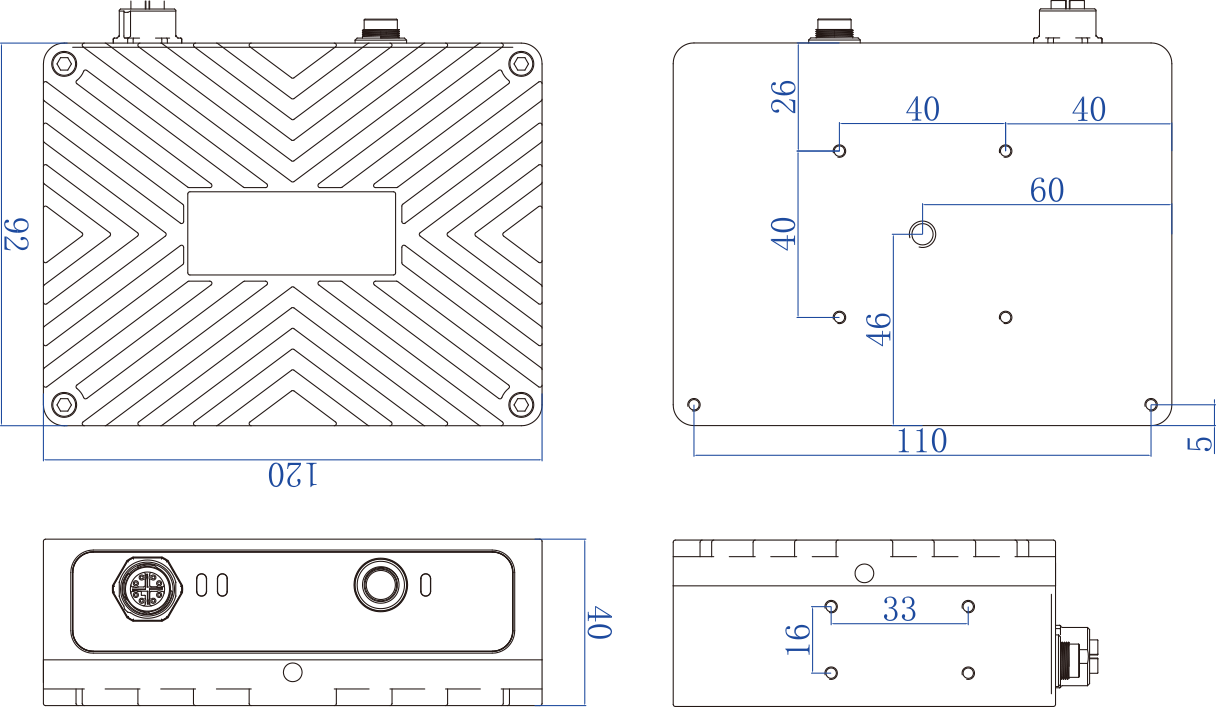
外形尺寸
规格参数
产品名称
Tracer P2
重量
397 g
原理
双目结构光
数据接口
TCP/IP,支持POE
重复精度 *
± 0.1 mm
功耗
8W
光源
红外光
使用环境
室内工厂
工作距离
275~525 mm
工作温度
-10~70℃
FOV
H64°x V50°
工作湿度
20%~65% 无凝露
深度图分辨率
1920x1200 @max 2fps
960x600 @max 6fps
960x600 @max 6fps
防水等级
IP65
外观尺寸
112 x 66 x 38 mm
其它(外设)
加装防护挡板、风冷
外壳材质
铝合金
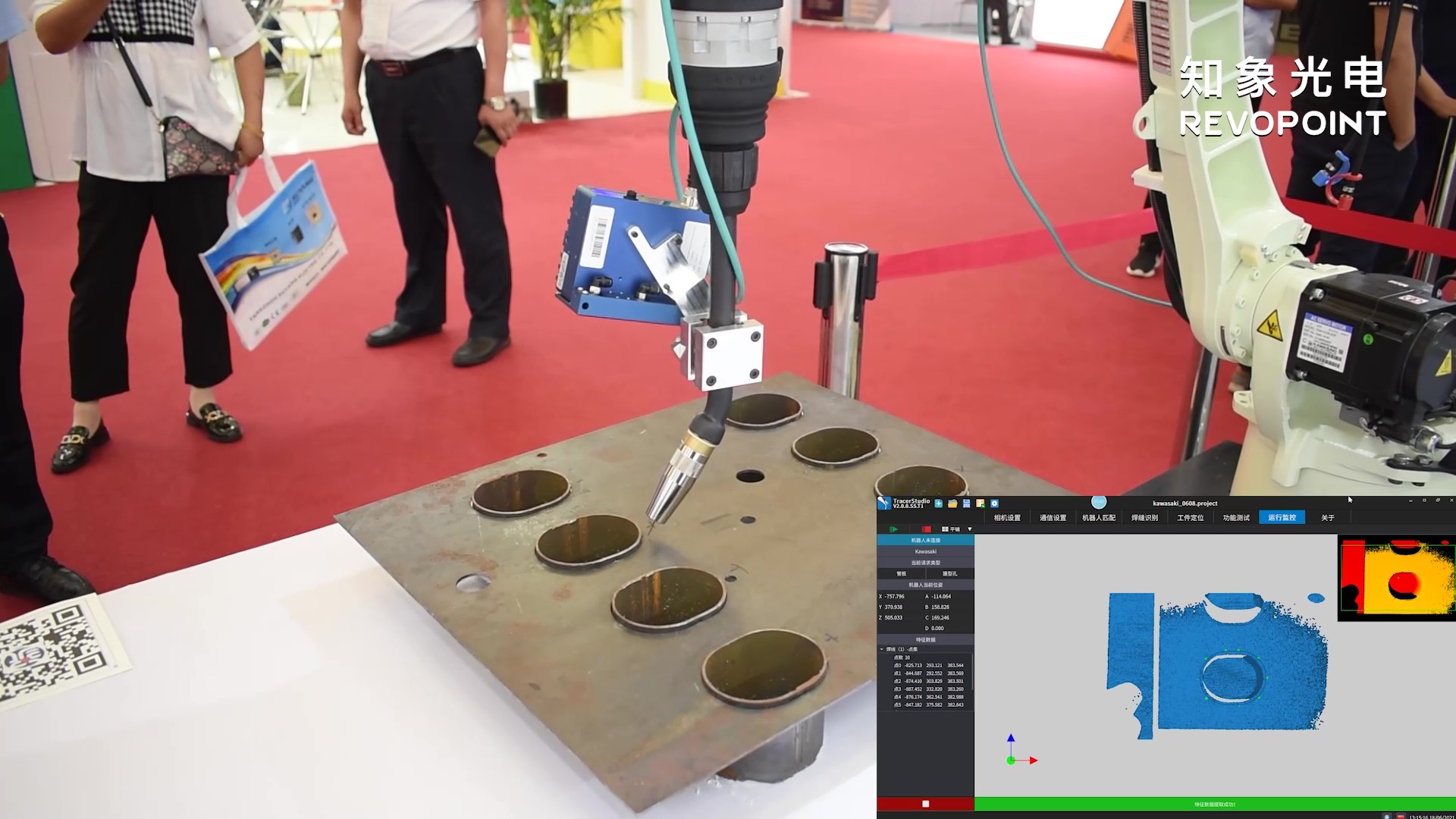
Tracer 3D 机器人焊接视觉软件



焊接视觉软件 Tracer Studio
Tracer Studio 焊接视觉软件,采用图形化调整界面,一键启动,简单易用,可处理钢结构、钢筋、管板、网状结构等复杂工件多场景焊接的应用需求。 同时,支持多种通讯协议,可与国内外多品牌机器人适配,可稳定高效完成任务。

3D 数模驱动

自动识别焊缝

高效精准

容差能力强
灵活易用
支持多品牌机器人
机器人视觉仿真软件 Tracer Studio Plus
Tracer Studio Plus 机器人视觉仿真软件深度融合在线仿真与数字孪生技术,通过正向数模驱动,实现钢结构焊接全流程的可视化预演、 智能化规划与零风险验证。用户均可通过虚拟仿真提前解决可达性、避障性及轨迹优化问题,节省 90% 现场调试时间, 真正告别传统焊接的反复试错与资源浪费。

数模驱动

在线仿真

数字孪生
自动标定软件 Tracer Calibration 3
Tracer Calibration 3 自动标定计算机器人末端执行器和 3D 相机相对位置关系,将视觉坐标系和机器人坐标系进行统一, 便于通过视觉引导机器人执行预定的空间轨迹与加工任务。软件操作简单,用户仅需 5 分钟即可全自动的完成标定工作, 软件兼容性好,支持多种品牌机器人。

操作简便

工作效率高

标定精度高
Tracer 3D焊接视觉系统
3D焊接视觉系统
让焊接智能、高效、可靠




×
 在线咨询
在线咨询

- 友情链接:
- 3D扫描仪