


机器焊接的不同寻位方式对比
发布时间:2023-12-06
焊接机器人作为现代制造业中的重要装备,广泛应用于各行各业。在焊接过程中,准确的焊缝寻位是保证焊接质量和效率的关键因素之一,也是实现焊接自动化生产的难点之一,解决自动化焊缝寻位难题是该领域的主要关注方向。
焊缝寻位,也称为焊缝传感,是在焊接过程开始之前检测工件上目标焊缝的位置和方向的过程,通常是使用传感器和软件程序来引导焊枪到缝的精确位置。焊缝寻位的目的是确保焊接精确地应用到焊缝上,这对于确保焊接的强度和完整性非常重要。然而,在一些大型工件焊接时,由于下料和组队误差的存在,焊枪初始位置定位完全依靠人工示教的方式进行,不仅效率低、精度差,而且对于水下焊接、狭小空间中焊接等操作人员不易到达的场合,人工定位识别焊缝轨迹走向尤为困难。
为了解决机器人示教编程复杂的问题,实现机器人自动化焊接,工程师们开发出了以下寻位方式:
一、焊丝寻位

(图片来源于网络)
焊丝寻位是一种简单而直观的定位方式。它通过焊丝与工件表面的接触,检测焊丝电信号来确定焊接位置。当焊丝触碰到工件表面时,会产生电压信号,接触传感器将电压信号反馈给机器人,机器人则会利用当前位置与程序设定位置的偏差值对路径进行修正,从而得出真实目标位置。

图1接触寻位原理
优势:
•操作简单,适用于焊接工艺相对简单、焊接目标形状规则的工件。
•由机器人集成,不受工件表面影响,不增加额外体积,而且成本相对较低。
劣势:
•焊丝与工件表面接触过程中易受到工件表面杂质的干扰,对工件表面的平整度和粗糙度有一定要求。
•不适用于高精度和表面敏感的焊接任务。
•逐点触碰,效率低。
二、激光寻位
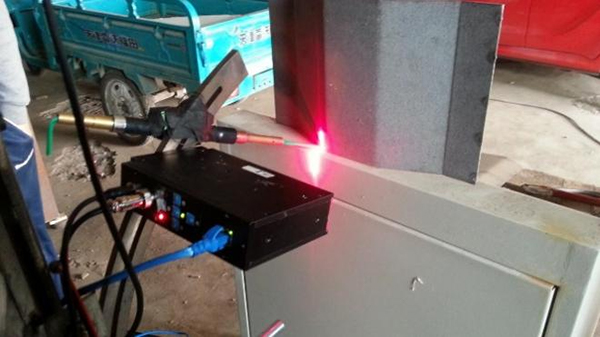
(图片来源于网络)
激光寻位即利用激光传感器对想要测量的位置进行单次测量,并计算目标点位置的过程。其工作原理是依靠激光视觉,由激光照射到焊缝表面,形成激光点或激光线,提取焊缝的特征数据点,并进行记录。在焊缝发生偏移后,再次采集焊缝的特征数据点,并自动计算出两次记录的点之间的差值,然后将偏差值添加到焊枪点来保证焊枪准确地达到焊缝起始位置,从而修正偏差。
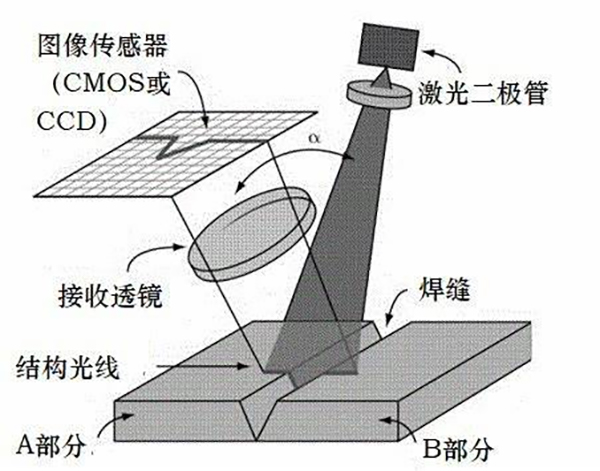
图2激光寻位原理
激光寻位又包括点激光寻位和线激光寻位两种方式:
点激光寻位
点激光寻位,是在焊接工件偏离示教点时,通过点激光传感器检测出示教点(开始点、中间点、结束点等)处的偏离量,并对各焊接线进行3D平移补正。激光点由激光器产生,经过适当的光学系统聚焦成小点。焊接机器人通过激光点在工件表面的坐标位置来确定焊接位置。
线激光寻位
线激光寻位是利用激光线在工件表面的位置来确定焊接位置。激光线由激光器产生,经过适当的光学系统聚焦成线形。在焊接过程中,线激光双目视觉传感器检测焊缝轨迹的空间位置和初始姿态,通过激光线在工件表面的位置和方向来确定焊接位置。线激光寻位方式相对于点激光寻位方式具有更高的精度和定位能力。
无论是点激光还是线激光,在焊接应用上也都有一定的优劣势。
优势:
•无接触:激光束无需直接接触工件表面就能完成焊接过程,可避免由于接触引起的污染和损伤,并减少工件的变形风险。
•激光寻位方式具有较高的精度和灵活性,可以适应不同形状和尺寸的焊接工件。
劣势:
•效率低:激光寻位对于光照条件和工件表面质量有一定要求,容易受到工件表面杂质的干扰,效率低下。
•编程复杂:激光焊接对操作技术和经验要求较高,编程复杂耗时。
•增加了额外的体积,对狭小空间不适用
总之,无论是焊丝寻位还是激光寻位这两种方法都需要提前进行示教编程,然后利用先验知识计算偏移量,准备工作耗时长,无法对应复杂场景。随着3D视觉技术的快速崛起,更加简便的3D相机寻位为机器人自动化焊接提供了新的可能。
3D相机寻位
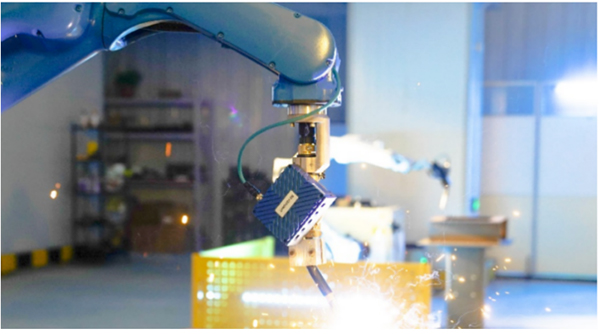
(图片来源于网络)
3D相机寻位是利用三维相机系统获取焊接工件的三维形状和纹理信息,通过图像处理和模式识别算法来确定焊接位置。3D相机寻位时,相机先拍摄工件的三维点云数据,直接识别出焊缝的位置,并直接计算焊接姿态,寻位速度快效率高。与传统的焊丝寻位和激光寻位相比,3D相机寻位更加灵活高效:在焊前准备阶段无需对焊缝进行示教编程,在焊接过程中单次拍照识别多条焊缝,大大简化了操作,帮助用户提高生产柔性和效率。
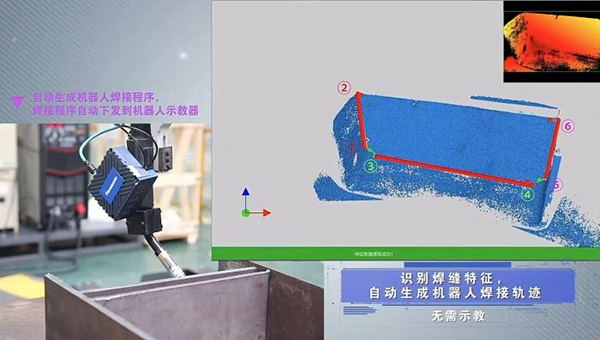
(图片来源于网络)
优势:
•无接触:3D相机无需直接接触工件表面,可避免由于接触引起的污染和损伤。
•效率高:无需提前示教编程,直接计算焊接姿态,一次拍照识别多条焊缝。
•容差高:可适应较大的平移旋转误差,只要能拍到就能识别到。
劣势:
•成本相对焊丝寻位和激光寻位更高。
•增加了额外的体积,对狭小空间不适用。
从焊丝寻位到激光寻位,再到3D相机寻位,机器人获取到的信息的维度一直在提升,智能化程度也在不断提高,对应的技术难度也不断加大。
知象光电立足于3D视觉硬科技,建立了从光学芯片、成像算法、到应用软件的自主技术体系,并较早地将3D视觉应用到机器人自动化焊接领域。其推出的Tracer P2凭借其强大的计算芯片、工业级精度、高防护的性能,搭载机器人视觉软件Tracer Studio,可实现3D点云实时采集、复杂焊缝特征快速提取、机器人轨迹智能规划、工件找正定位等功能,可广泛应用于钢结构、车厢板、人防门、钢筋、管板焊接等各种复杂严苛的工作环境。

(图片来源于网络)
上一篇:3D视觉在机器人焊接领域的应用、挑战与机会
热门资讯
-
1. 3D工业相机那个品牌好? 1680

2. 焊接视觉技术国内外研究现状 1385
3. 知象光电3D焊接视觉系统助力智能制造落地提速 1174
4. 新发展 3D机器视觉VS工业自动化 875
5. 机器之眼 | 3D相机能让机器人看见什么? 799
6. 3D相机 | 工业机器人无序抓取,用3D相机就对了! 762
7. 3D相机检测,到底有多优秀? 703
8. 3D视觉在机器人焊接领域的应用、挑战与机会 678
9. 机器焊接的不同寻位方式对比 595
.
-
10. 3D相机应用盘点之焊接自动化 532
11. 3D相机成机器视觉标配-焊接自动化大势所趋 487
12. 3D相机应用前景分析 工业4.0时代的标配 455
13. 智能人脸补全算法 448
14. 视觉传感器技术分类 427
15. 3D相机是什么?3D相机效果怎么样? 401
16. 智能控制与自动化不可或缺的机器视觉装备 312
17. 工博会金秋开启,要逛展先看这里! 295
18. 中国工博会9月盛大启幕,知象光电期待与您沪上相约! 289
.
-
19. 经典案例丨数模驱动,焊接自动化智慧升级 273
20. 9月光博会,你不可错过的除了知象光电,还有这些逛展福利!(超详细攻略,按需自取) 233
 换一换
换一换
最新资讯
-
1. 机器焊接的不同寻位方式对比 595
2. 3D视觉在机器人焊接领域的应用、挑战与机会 678
3. 经典案例丨数模驱动,焊接自动化智慧升级 273
4. 知象光电3D焊接视觉系统助力智能制造落地提速 1174
5. 视觉传感器技术分类 427
6. 焊接视觉技术国内外研究现状 1385
7. 工博会金秋开启,要逛展先看这里! 295
8. 3D相机应用盘点之焊接自动化 532
9. 3D相机应用前景分析 工业4.0时代的标配 455
.
-
10. 9月光博会,你不可错过的除了知象光电,还有这些逛展福利!(超详细攻略,按需自取) 233
11. 中国工博会9月盛大启幕,知象光电期待与您沪上相约! 289
12. 3D相机检测,到底有多优秀? 703
13. 3D相机 | 工业机器人无序抓取,用3D相机就对了! 762
14. 机器之眼 | 3D相机能让机器人看见什么? 799
15. 3D工业相机那个品牌好? 1680
16. 3D相机是什么?3D相机效果怎么样? 401
17. 3D相机成机器视觉标配-焊接自动化大势所趋 487
18. 智能人脸补全算法 448
.
-
19. 智能控制与自动化不可或缺的机器视觉装备 312
20. 新发展 3D机器视觉VS工业自动化 875
换一换
 在线咨询
在线咨询
