


3D相机 | 工业机器人无序抓取,用3D相机就对了!
发布时间:2020-05-26
工业机器人完成重复性工作已经很常见,而无序的应用环境则要复杂得多。这意味着机器人无法依靠设定好的程序继续执行工作,而是需要对环境进行感知、分析,进而再做出判断。
早在在3D视觉还没有付诸工业应用之前,杂乱、无序的工作任务通常是用传统的工装实现定位的。这种方式无法满足不同产品使用一个工装定位的需求。而随着智能制造的不断发展,工业生产中无序类应用需求已经越来越多。
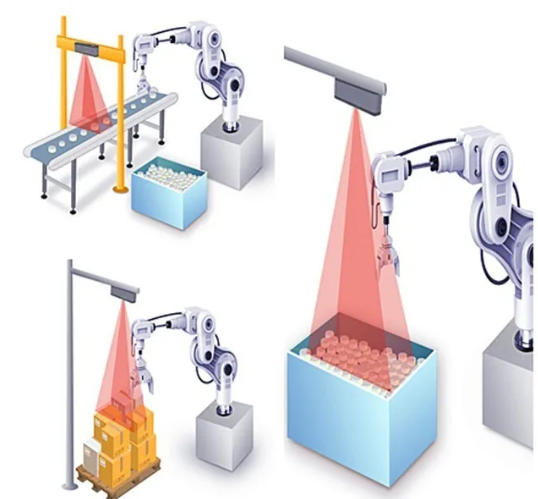
为了解决这一难题,3D相机就成了这类应用场景的最佳选择。因为3D视觉引导解决方案专业针对散乱无序堆放的工件设计,可协助机器人高效准确地完成3D智能抓取。这就替代了传统的工装夹具,并很好地解决了柔性化工装的问题。
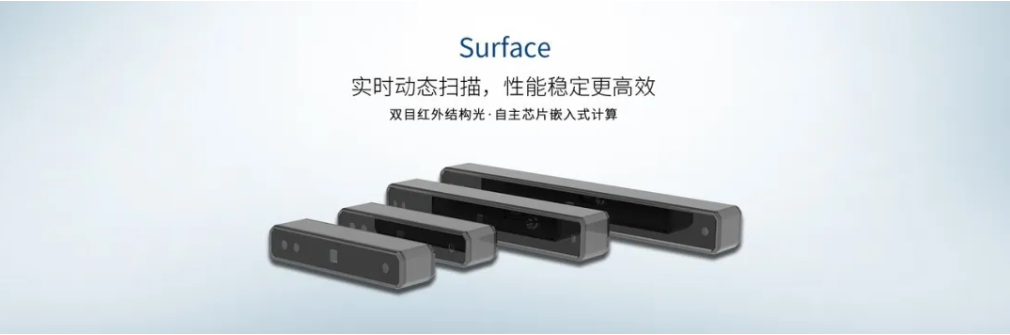
知象光电自主研发的工业级3D相机,采用双目立体视觉和安全无感的红外光源。可实时扫描获取工件的点云数据,并通过对点云数据进行3D建模,完成智能识别与定位分析,准确判断出工件当前的姿态位置,以数据接口发送工件的三维坐标信息给机器人,从而使其完成复杂的识别与抓取任务。
精度高、效率高、通用性高可以说是3D视觉定位系统最为显著的优势。
作为工业级3D相机的Surface,其最高精度可以达到0.02mm;而其动态实时扫描的性能,可以实现真正意义上的连续不间断工作;此外,由于知象光电十余年来一直致力于底层核心硬件技术研发,Surface系列3D相机可以搭载不同品牌的机器人进行作业。
对多品种工件进行3D定位;
对复杂多面工件进行3D定位,完成柔性抓取;
对料框堆叠物体进行3D识别定位;
对大型物体进行3D定位抓取;
针对无序来料,进行3D定位;
针对多机器人协作,进行3D定位抓取;
对输送带上的物体进行3D定位抓取;
喷涂机器人来料3D识别定位;
焊接机器人进行焊缝3D识别跟踪;
对大型设备的装配进行3D定位;
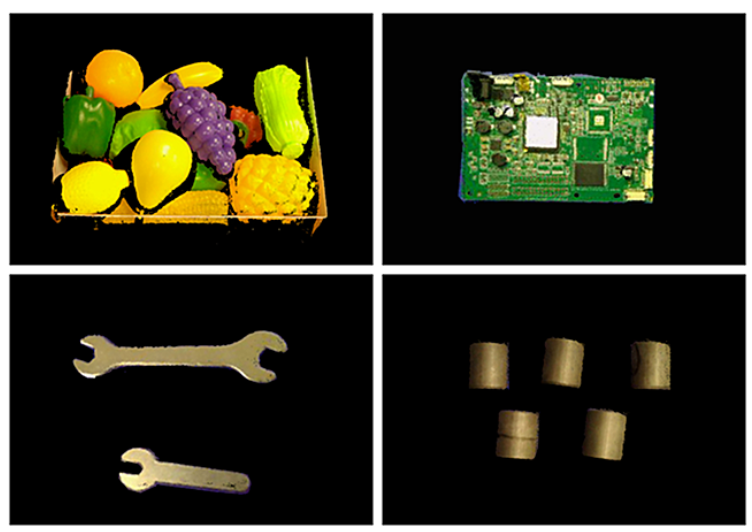
Surface系列工业3D相机 点云效果图

从生产和环境适应性的角度讲,未来几年的工业发展会对3D视觉有着更广泛的需求。高品质的3D相机能够通过对工件3D数据的扫描,帮助机器人快速准确的找到被测零件并确认其位置,引导机械手准确抓取定位工件,实现工业机器人自动化生产线的柔性工装。在应用拓展方面,除了智能抓取,机器人3D视觉在自动化焊接、自动化切割、自动化装配、自动化码垛等方面同样也有优秀表现。
作为柔性生产领域不可或缺的智能视觉硬件制造者,知象光电的3D相机始终立足实际应用,不断迭代改良,力求用更好的产品满足用户的需求。
相关产品
上一篇:机器之眼 | 3D相机能让机器人看见什么?
下一篇:3D相机检测,到底有多优秀?
热门资讯
-
1. 3D工业相机那个品牌好? 1641

2. 焊接视觉技术国内外研究现状 1350
3. 知象光电3D焊接视觉系统助力智能制造落地提速 1146
4. 新发展 3D机器视觉VS工业自动化 842
5. 机器之眼 | 3D相机能让机器人看见什么? 790
6. 3D相机 | 工业机器人无序抓取,用3D相机就对了! 742
7. 3D相机检测,到底有多优秀? 682
8. 3D视觉在机器人焊接领域的应用、挑战与机会 629
9. 机器焊接的不同寻位方式对比 569
.
-
10. 3D相机应用盘点之焊接自动化 512
11. 3D相机成机器视觉标配-焊接自动化大势所趋 475
12. 3D相机应用前景分析 工业4.0时代的标配 440
13. 智能人脸补全算法 438
14. 视觉传感器技术分类 425
15. 3D相机是什么?3D相机效果怎么样? 399
16. 智能控制与自动化不可或缺的机器视觉装备 306
17. 工博会金秋开启,要逛展先看这里! 292
18. 中国工博会9月盛大启幕,知象光电期待与您沪上相约! 288
.
-
19. 经典案例丨数模驱动,焊接自动化智慧升级 261
20. 9月光博会,你不可错过的除了知象光电,还有这些逛展福利!(超详细攻略,按需自取) 211
 换一换
换一换
最新资讯
-
1. 机器焊接的不同寻位方式对比 569
2. 3D视觉在机器人焊接领域的应用、挑战与机会 629
3. 经典案例丨数模驱动,焊接自动化智慧升级 261
4. 知象光电3D焊接视觉系统助力智能制造落地提速 1146
5. 视觉传感器技术分类 425
6. 焊接视觉技术国内外研究现状 1350
7. 工博会金秋开启,要逛展先看这里! 292
8. 3D相机应用盘点之焊接自动化 512
9. 3D相机应用前景分析 工业4.0时代的标配 440
.
-
10. 9月光博会,你不可错过的除了知象光电,还有这些逛展福利!(超详细攻略,按需自取) 211
11. 中国工博会9月盛大启幕,知象光电期待与您沪上相约! 288
12. 3D相机检测,到底有多优秀? 682
13. 3D相机 | 工业机器人无序抓取,用3D相机就对了! 742
14. 机器之眼 | 3D相机能让机器人看见什么? 790
15. 3D工业相机那个品牌好? 1641
16. 3D相机是什么?3D相机效果怎么样? 399
17. 3D相机成机器视觉标配-焊接自动化大势所趋 475
18. 智能人脸补全算法 438
.
-
19. 智能控制与自动化不可或缺的机器视觉装备 306
20. 新发展 3D机器视觉VS工业自动化 842
换一换
 在线咨询
在线咨询
